自動飛行系統(tǒng)
軟件平臺

無人機作為一種廣泛應(yīng)用于各個領(lǐng)域的飛行器,主要有三種飛行模式,分別是GPS模式、姿態(tài)模式和手動模式。這些飛行模式提供了不同的控制方式和飛行特性,使得無人機能夠在不同任務(wù)和環(huán)境中靈活應(yīng)用。
一、GPS模式
GPS模式是目前無人機最常用的飛行模式之一。在GPS模式下,無人機會通過GPS和其他定位技術(shù)來定位、導(dǎo)航和保持飛行位置。這種模式適用于需要穩(wěn)定飛行和保持特定位置,且信號穩(wěn)定的任務(wù)場景中。在GPS模式下,無人機具備自動懸停的能力,能夠精確地停留在空中的某一位置,不受風(fēng)速和風(fēng)向的影響。此外,無人機還能實現(xiàn)預(yù)設(shè)航點飛行和返回起點等功能。操作員只需事先設(shè)定好航點或任務(wù),無人機就能按照設(shè)定的路徑進行飛行,大大降低了操控的難度。
二、姿態(tài)模式
在姿態(tài)模式下,無人機不會自動穩(wěn)定飛行位置,而是主要由操作員來控制。無人機會根據(jù)操作員輸入的控制信號來實現(xiàn)各種動作和飛行姿態(tài),比如滾轉(zhuǎn)、俯仰、偏航等。姿態(tài)模式適用于需要更靈活操控和執(zhí)行復(fù)雜動作的任務(wù),比如特技飛行、競速等。通過操縱遙控器,操作員可以實現(xiàn)無人機的各種精準動作,提升飛行的靈活性和操控的精準性。因而,相對于GPS模式,姿態(tài)模式對操作員的要求更高。
三、手動模式
在手動模式下,無人機完全由操作員控制飛行,沒有輔助穩(wěn)定系統(tǒng)的支持。操作員需要手動控制每一個動作和飛行姿態(tài),并始終保持對無人機的掌控。手動模式通常是為了專業(yè)的飛行員或飛行控制員進行特殊操作或測試使用。相較于其他兩種模式,手動模式對操作員的駕駛技術(shù)和飛行經(jīng)驗要求更高。只有經(jīng)過充分的訓(xùn)練和實踐,操作員才能熟練地掌握無人機的飛行,并在需要的時候快速作出反應(yīng)。
事實上,在實際應(yīng)用中,不同的飛行模式往往會結(jié)合使用,以滿足不同任務(wù)的需求。例如,在無人機執(zhí)行航拍任務(wù)時,可以先使用GPS模式預(yù)設(shè)航點,保證實現(xiàn)規(guī)劃好的拍攝路徑;然后轉(zhuǎn)換到姿態(tài)模式,通過操縱遙控器來調(diào)整無人機的角度和位置,獲取特定角度和視角的拍攝效果。




免費預(yù)約演示
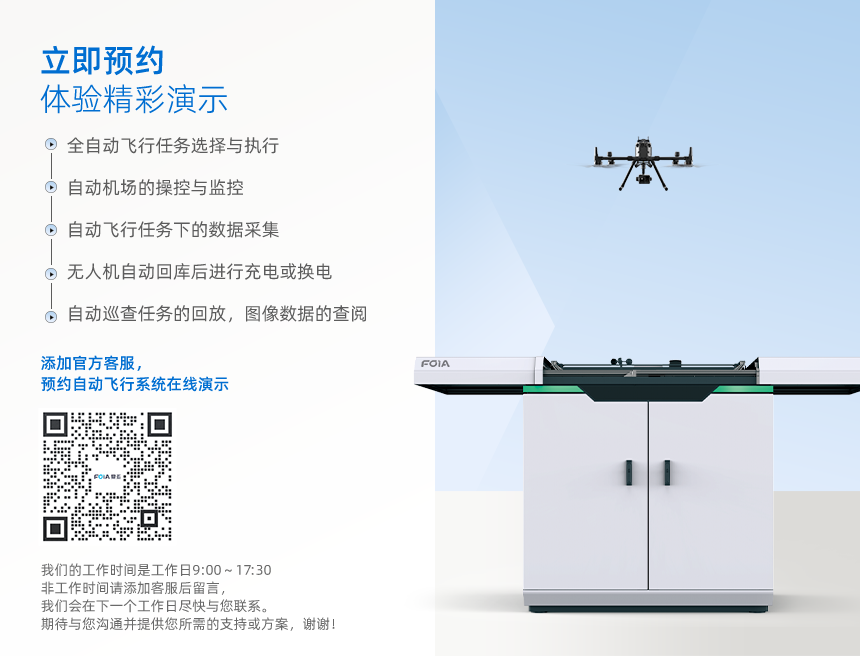
 全自動飛行任務(wù)選擇與執(zhí)行
自動機場的操控與監(jiān)控
自動飛行任務(wù)下的數(shù)據(jù)采集
無人機自動回庫后進行充電或換電
自動巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
全自動飛行任務(wù)選擇與執(zhí)行
自動機場的操控與監(jiān)控
自動飛行任務(wù)下的數(shù)據(jù)采集
無人機自動回庫后進行充電或換電
自動巡查任務(wù)的回放,圖像數(shù)據(jù)的查閱
添加官方客服

我們的工作時間是工作日9:00~17:30
期待與您溝通并提供您所需的支持或方案,謝謝!
 行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式
行業(yè)方案與產(chǎn)品報價
相關(guān)場景案例資料
復(fù)亞自動飛行系統(tǒng)功能
靈活的商務(wù)合作模式

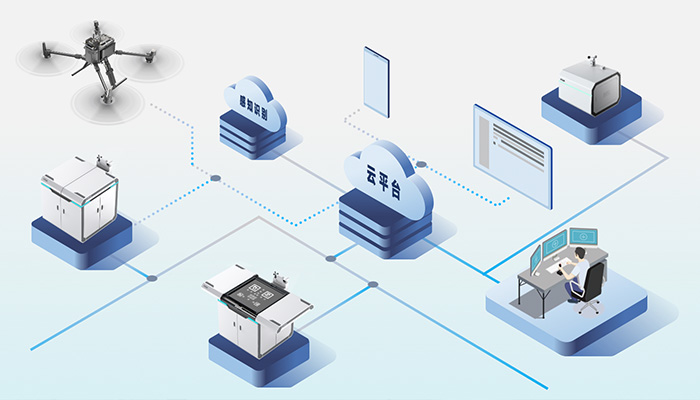
復(fù)亞智能是業(yè)內(nèi)領(lǐng)先的無人機全自動飛行系統(tǒng)研發(fā)和服務(wù)商,用高度智能的自動飛行系統(tǒng)滿足政企用戶低空巡查業(yè)務(wù)需求,分布式部署的無人機機場,讓巡邏干預(yù)隨時可達,巡檢數(shù)據(jù)觸手可及。
投資郵箱:invest@foiadrone.com
媒體合作:BD@foiadrone.com
微信客服
周一至周五:9:00-17:30

掃碼關(guān)注